Compte tenu de l’expansion du marché de la robotique, les professionnels du domaine sont unanimes : les normes doivent soutenir ce développement.
La sécurité est au cœur des préoccupations en raison des évolutions du contexte technologique et réglementaire : cybersécurité, intelligence artificielle à restreindre dans ce domaine dans un premier temps par l’apprentissage automatique, besoins des industriels qui souhaitent disposer de machines de plus en plus autonomes, évolution de la règlementation européenne avec le règlement machines 2023/1230 qui sera applicable à partir de janvier 2027.
L’histoire de ces normes EN ISO débute en 2006 avec la publication de l’EN ISO 10218-1 Robots. Auparavant, il existait une norme européenne fournissant un moyen de se conformer aux exigences de la Directive Machines et une norme internationale différente. La première édition de la partie 2 relative au système robot et intégration n’a vu le jour, quant à elle, qu’en 2011. Cette première édition nécessita alors que la partie 1 soit également révisée cette année-là afin de mettre en cohérence les deux parties.
Après plus de 10 ans d’existence, il était nécessaire de les revoir pour tenir compte des évolutions du marché et de l’état de l’art. C’est en 2016 lors de l’examen systématique, enquête qui permet de questionner la pertinence des normes, que les pays se sont accordés pour leur révision : la France demandait en particulier une harmonisation du vocabulaire et la réécriture du mode de marche collaboratif. Le vote final avant publication, qui sera prochainement lancé, vise à maximiser les chances de leur citation au Journal Officiel de l’Union Européenne afin de donner présomption de conformité à la Directive Machines et au règlement Machines.
Ces travaux sont menés par la commission de normalisation UNM 81 Robots et composants robotiques composée de 40 experts représentants les autorités règlementaires (Ministère du travail), les évaluateurs, les fabricants, les porteurs de politique publique (INRS et EUROGIP), les supports techniques et les utilisateurs.
Quels sont les points qui évoluent ?
Pour la partie 1 :
- la clarification des exigences de sécurité fonctionnelle ;
- la classification des robots (classe I et classe II) pour les exigences de sécurité fonctionnelle ;
- l’ajout d’exigences pour la conception ;
- l’ajout d’exigences de mode ;
- l’ajout d’une méthodologie d’essai pour déterminer la force maximale par manipulateur pour les robots de classe I ;
- l’ajout d’exigences de cybersécurité dans la limite où elles s’appliquent à la sécurité du robot industriel ;
- l’incorporation d’exigences de sécurité relatives aux robots industriels destinés à être utilisés dans des applications collaboratives (anciennement contenues dans l’ISO/TS 15066). La notion de “mode” collaboratif n’existe plus : les applications sont collaboratives ou non. Pour réaliser une application collaborative, on peut utiliser des technologies collaboratives qui peuvent être combinées entre elles pour réduire le risque.
Pour la partie 2 :
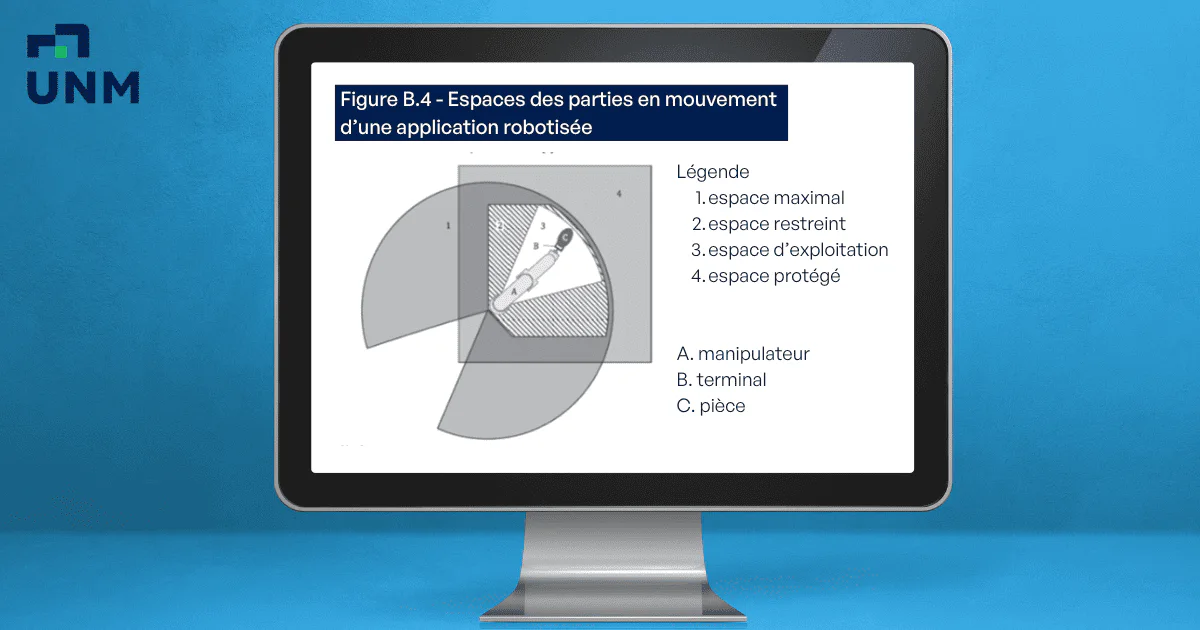
- la priorité donnée à l’application robotisée et non au système robot, puisque l’application robotisée inclut les pièces, le programme de tâche, ainsi que la machine et l’équipement pour prendre en charge l’application et les tâches prévues ;
- l’incorporation d’exigences de sécurité pour les applications collaboratives (anciennement, le contenu de l’ISO/TS 15066) ;
- la clarification des exigences de sécurité fonctionnelle ;
- l’ajout d’exigences pour la cybersécurité dans la mesure où elle s’applique.
Les experts français du réseau de prévention reconnus par les experts du groupe ont fortement contribué à l’amélioration de la sécurité. Pour compléter ces normes, le groupe de travail ISO/TC 299/WG 3 Sécurité industrielle prépare un document informatif complémentaire qui a pour objectif d’expliquer la partie 2.
En effet, la norme étant complexe et les modifications nombreuses entre les versions 2011 et la future version, il a été décidé de développer ce guide qui donnera les évolutions de la norme ainsi que des exemples d’application pour l’utilisateur.